Task and Motion Planning
We use PDDLStream to perform integrated task and motion planning (TAMP). This tool expands task planning with purely discrete parameters using Planning Domain Definition Language (PDDL) by adding the concept of streams for sampling continuous parameters in actions.
If you did not already install PDDLStream, ensure you do so with this script, then re-source.
./setup/configure_pddlstream.bash
source ./setup/source_pyrobosim.bash
Examples
Regardless of running standalone or using ROS 2, we have included a set of examples that gradually build up from simple, purely discrete planning, to a more complex integrated TAMP demo with continuous action parameters.
The current example list is:
01_simple- Simple domain with purely discrete actions.02_derived- Purely discrete actions, but uses derived predicates for more complex goals.03_nav_stream- Samples navigation poses and motion plan instances.04_nav_manip_stream- Samples navigation poses, motion plans, and collision-free object placement instances.05_nav_grasp_stream- Samples navigation poses, motion plans, grasp plans, and collision-free object placement instances.06_open_close_detect- Extends the02_deriveddomain with additional actions to detect objects and open and close locations. Does not contain any streams.
These PDDL domain and stream description files can be found in the pyrobosim/pyrobosim/data/pddlstream/domains folder.
Standalone
You can try running a sample script as follows
cd /path/to/pyrobosim/pyrobosim
python3 examples/demo_pddl.py --example 01_simple --verbose
With ROS 2
First, build and setup your ROS 2 workspace (or use one of our provided Docker containers).
cd /path/to/ros_workspace
colcon build
. install/local_setup.bash
With ROS 2, the idea is to separate out functionality into different nodes.
To start a world and then a planner with a hard-coded goal specification:
ros2 run pyrobosim_ros demo_pddl_world.py
ros2 run pyrobosim_ros demo_pddl_planner.py --ros-args -p example:=01_simple -p subscribe:=false
To start a world, a planner, and a separate node that publishes a goal specification:
ros2 run pyrobosim_ros demo_pddl_world.py
ros2 run pyrobosim_ros demo_pddl_planner.py --ros-args -p example:=01_simple -p subscribe:=true
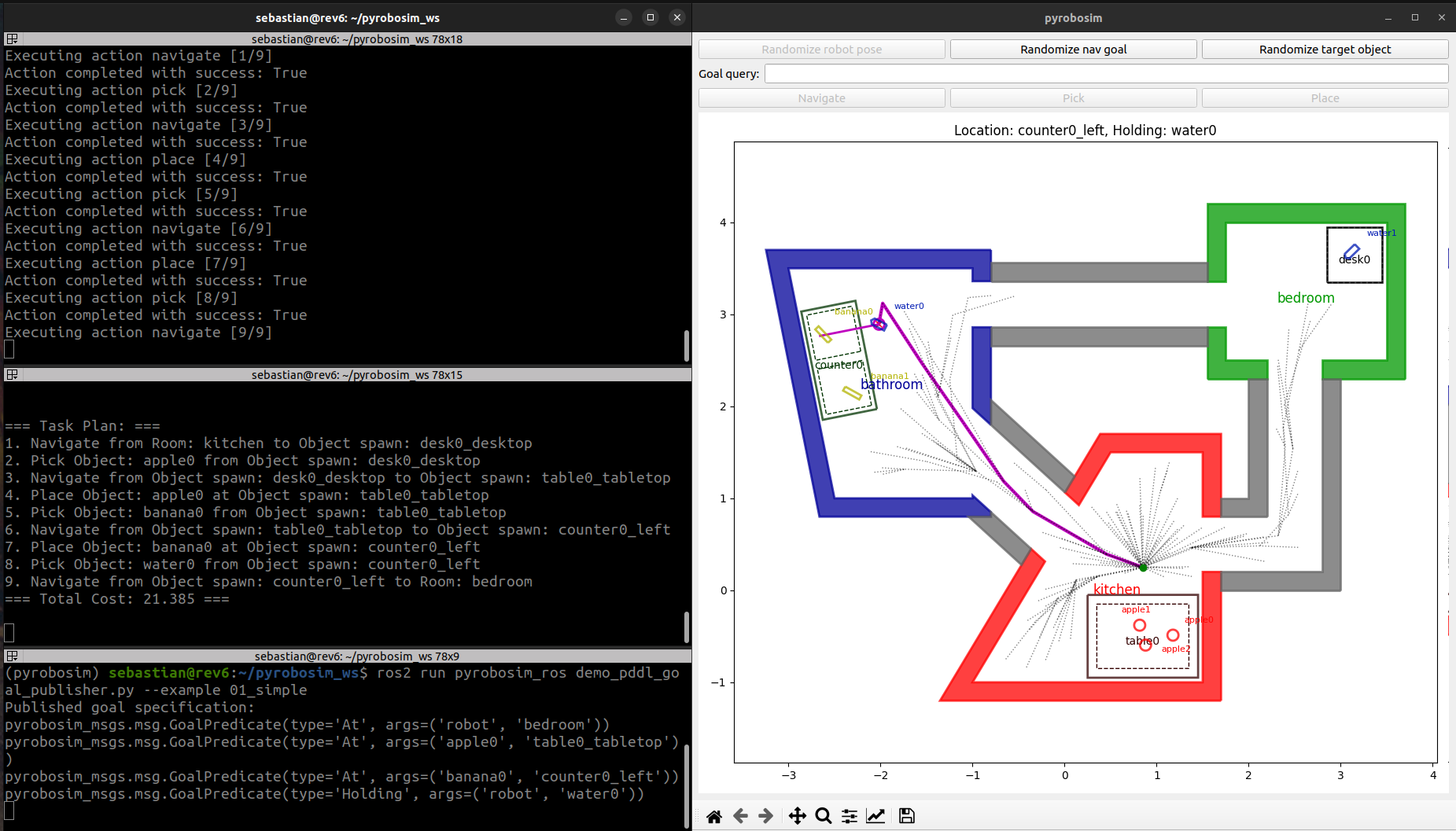
ros2 run pyrobosim_ros demo_pddl_goal_publisher.py --ros-args -p example:=01_simple
Alternatively, you can use a single launch file to run the full example and configure it:
ros2 launch pyrobosim_ros demo_pddl.launch.py example:=01_simple
ros2 launch pyrobosim_ros demo_pddl.launch.py example:=04_nav_manip_stream subscribe:=true verbose:=true
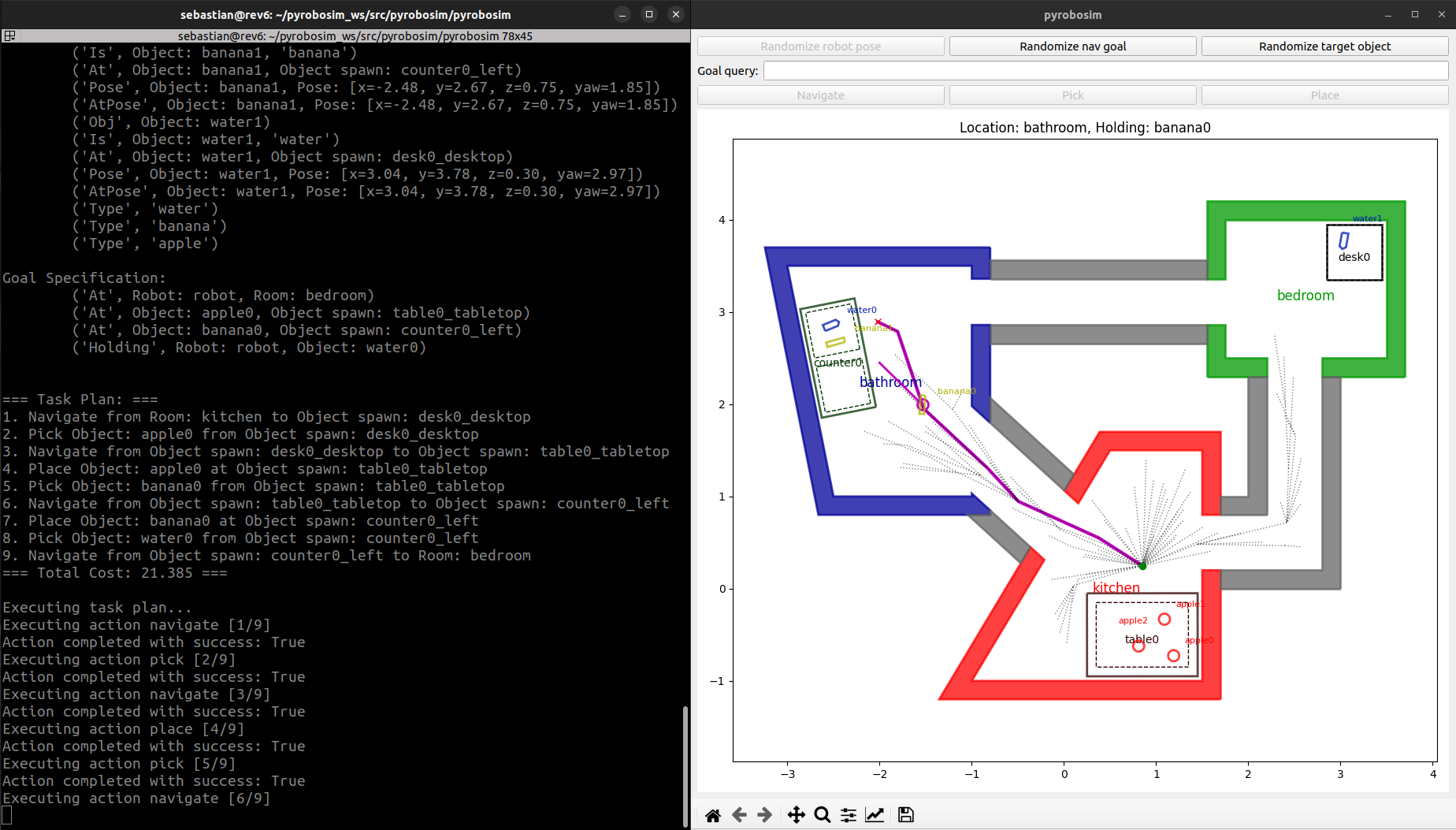
The output should look as follows: