Concepts
PyRoboSim is primarily a world modeling framework for prototyping high-level robotics behavior applications.
Worlds
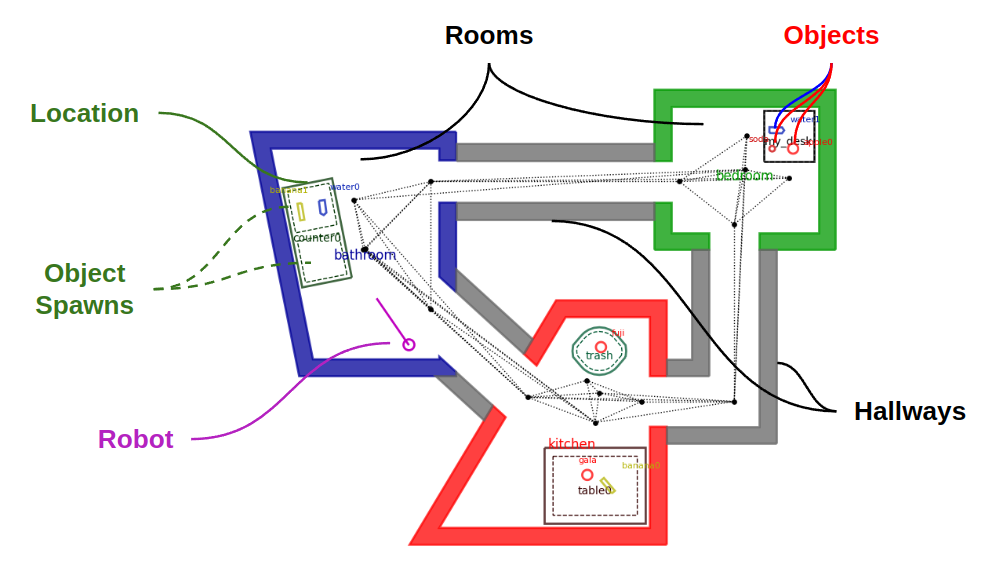
Worlds in PyRoboSim consist of a hierarchy of polygonal entities, including:
Robots: A movable entity capable of actions that can change its own state and the state of the world.
Rooms: Regions that a robot can navigate.
Hallways: Regions connecting two rooms, which a robot can navigate, open, and close.
Locations: Regions inside rooms that may contain objects (e.g., furniture or storage locations).
Object Spawns: Subregions of locations where objects may exist (e.g., a left vs. right countertop).
Objects: Discrete entities that can be manipulated around the world.
This is all represented in a 2.5D environment (SE(2) pose with vertical (Z) height). However, full 3D poses are representable as well. For more information, refer to the Geometry Conventions section.
Actions
Within the world, we can spawn a robot that can perform a set of actions, such as navigating, picking, and placing. To learn more, refer to Robot Actions.
These actions can be specified individually, or as a sequence of actions (a plan). Actions or plans can be commanded directly, e.g., “go to the table and pick up an apple”. They can also come from a Task and Motion Planning framework that accepts a task specification (e.g., “all apples should be on the kitchen table”) and outputs a plan that, when executed, satisfies the specification.
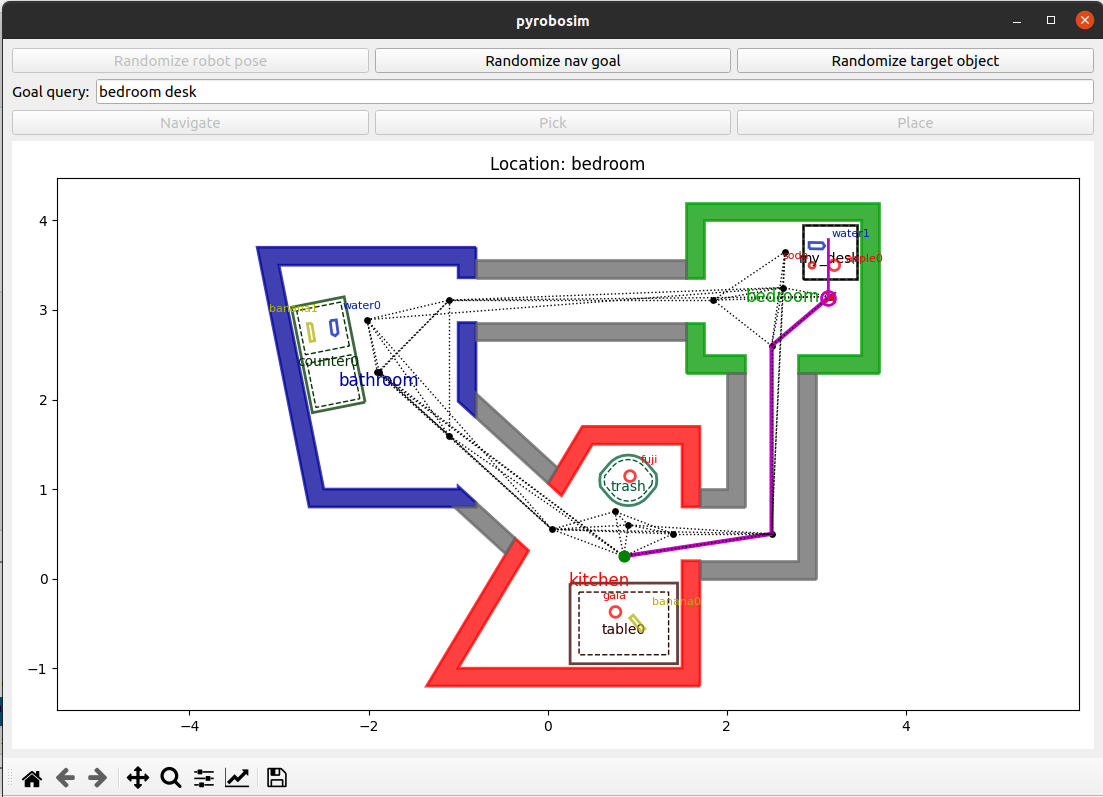
For example, here is a robot performing a Navigate action from the kitchen to the desk in our simple test world.