Multirobot Environments
PyRoboSim enables you to run multirobot environments.
Standalone
To run a multirobot world, you can try this example:
cd /path/to/pyrobosim/pyrobosim
python3 examples/demo.py --multirobot
Or you can use a sample multirobot world file:
cd /path/to/pyrobosim/pyrobosim
python3 examples/demo.py --world-file test_world_multirobot.yaml
With ROS 2
First, build and setup your ROS 2 workspace (or use one of our provided Docker containers).
cd /path/to/ros_workspace
colcon build
. install/local_setup.bash
You can run a ROS 2 enabled multirobot demo and interact with the GUI:
ros2 run pyrobosim_ros demo.py --ros-args -p world_file:=test_world_multirobot.yaml
In a separate Terminal, you can send an action goal with a multirobot plan:
ros2 run pyrobosim_ros demo_commands.py --ros-args -p mode:=multirobot-plan
Alternatively, you can run a single launch file:
ros2 launch pyrobosim_ros demo_commands_multirobot.launch.py
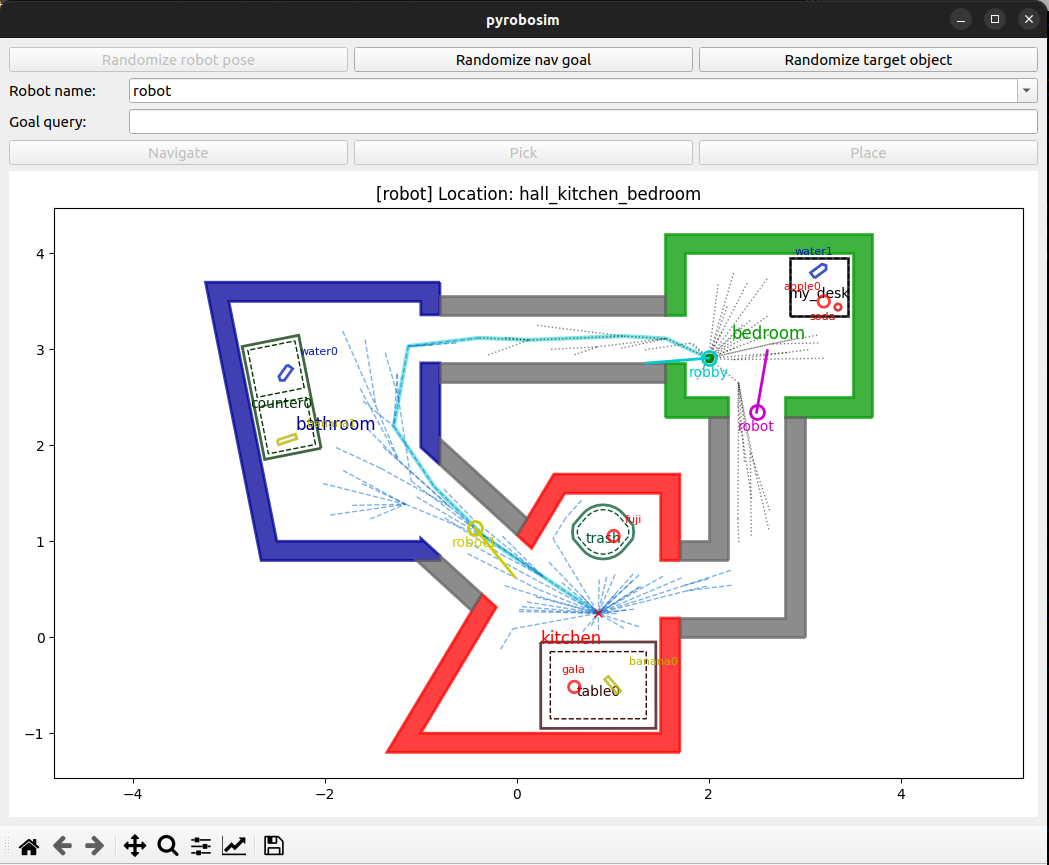
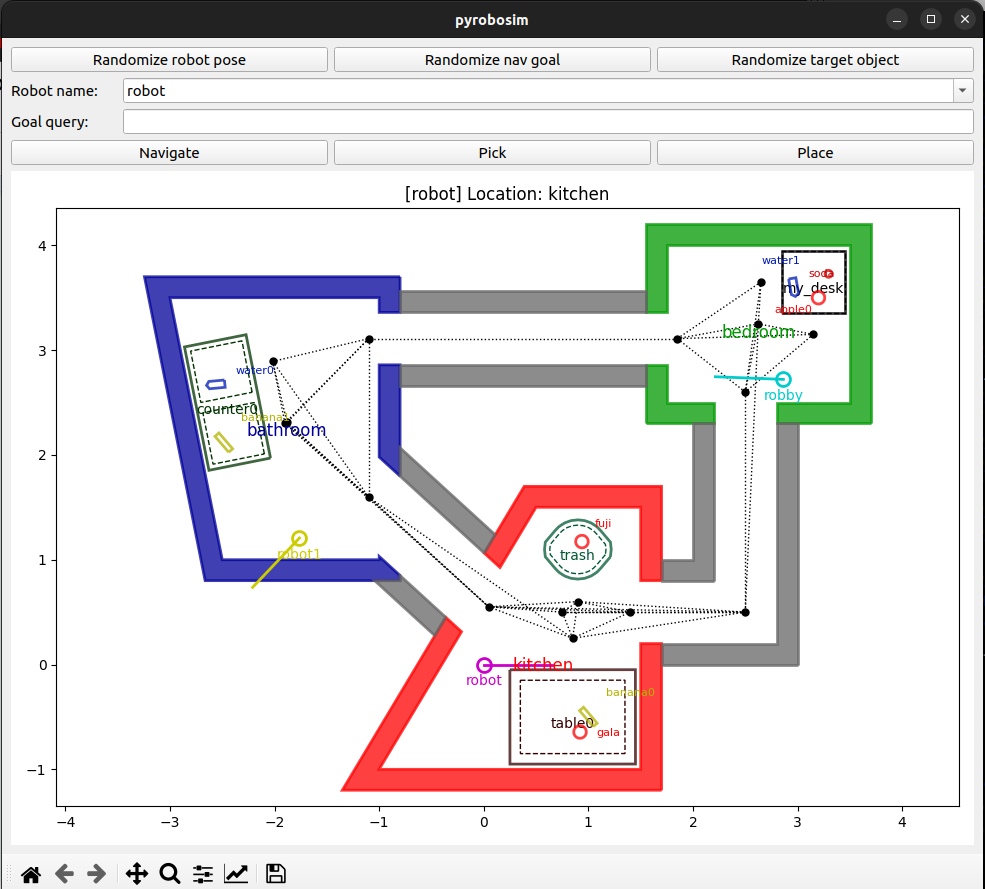
The output should look as follows: